Fahrerassistenzsysteme und bestimmte automatisierte Fahrfunktionen brauchen eine präzise Information über die aktuelle Sichtweite des Fahrers. Diese Information ist mit den Sensoren eines autonomen Fahrzeugs (vor allem LIDAR und RADAR) nahezu unmöglich zu ermitteln.
Daher haben wir ein neuronales Netz mit Hilfe von synthetisch erzeugten Trainingsdaten und realen Videofahrten trainiert. Das Neuronale Netz ermöglicht die Prognose der Sichtweite mit einer maximalen Toleranz von fünf Metern.
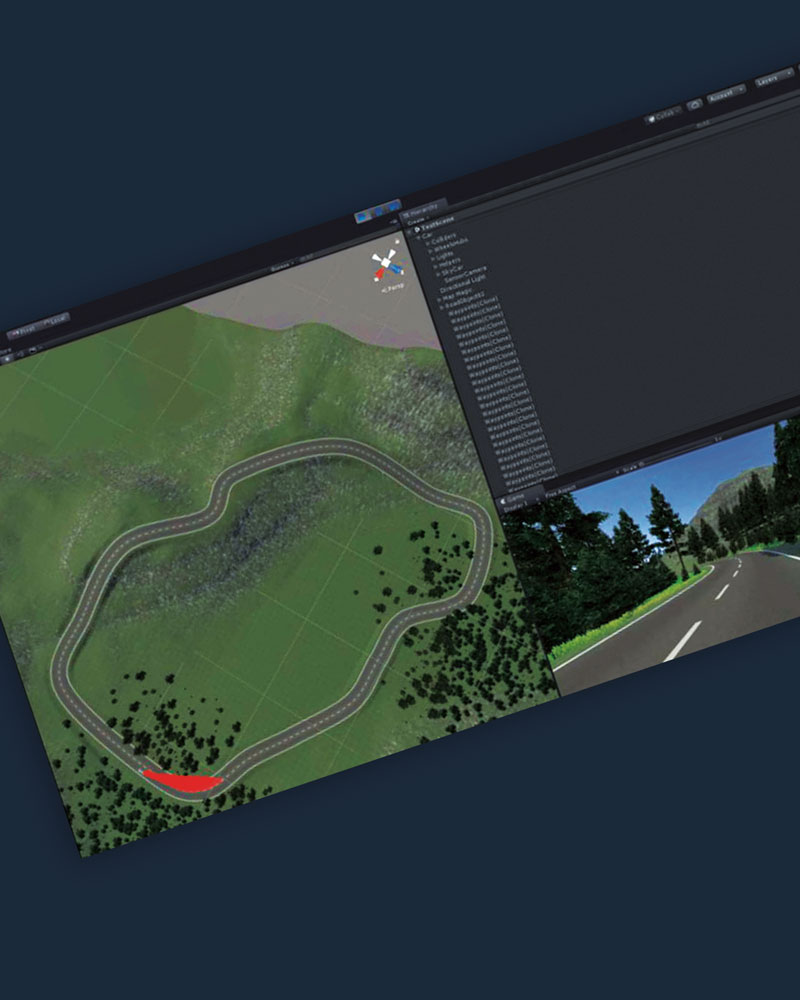
Es wurde eine realistische virtuelle Umgebung generiert, die große Datenmengen erzeugt und automatisch labelt. Diese Daten wurden durch reale Videofahrten ergänzt und in der Microsoft Azure Cloud trainiert.