Bei der Entwicklung automatisierter Fahrfunktionen stoßen typische Verfahren zur Erzeugung von Radar Modellen schnell an ihre Grenzen. Sowohl die aufwändige Modellierung relevanter physikalischer Effekte als auch die benötigte Rechenzeit verhindern oftmals den praktischen Einsatz solcher Modelle.
Unser Verfahren lernt von realen Sensordaten mittels eines Variational Autoencoders. Dies ermöglicht die schnelle Vorhersage und Simulation eines realen Radar-Scans der durch Kameras und Laserscans erfassten Umgebung.
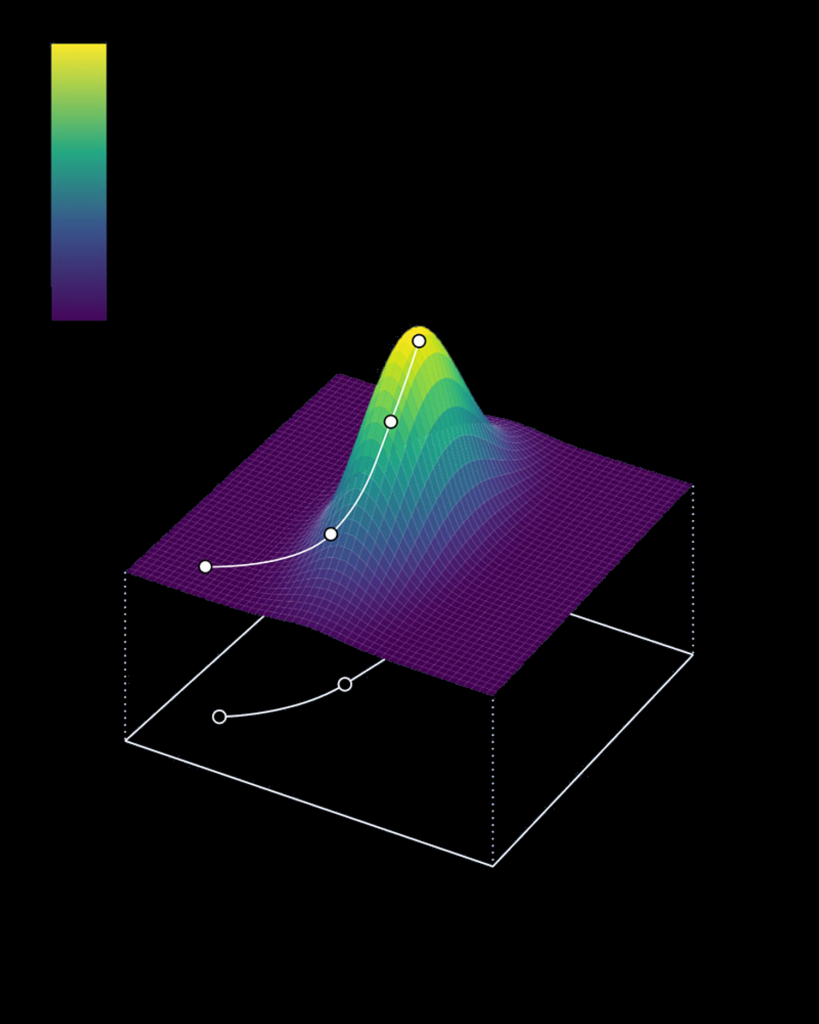
Statt lediglich eines Radarscans liefert unsere Methode jedoch eine Verteilung realistischer Radarscans, die für jede Situation mögliche physikalische Störeffekte abbilden kann.